

Arkadaşlar merhaba. Bu yıl ilk defa meb robot hızlı çizgi izleyen kategorisine katılacağız. Malzemeleri ne yazık ki 2 öğretmen arkadaş tamamen kendi imkanlarımızla alıyoruz.
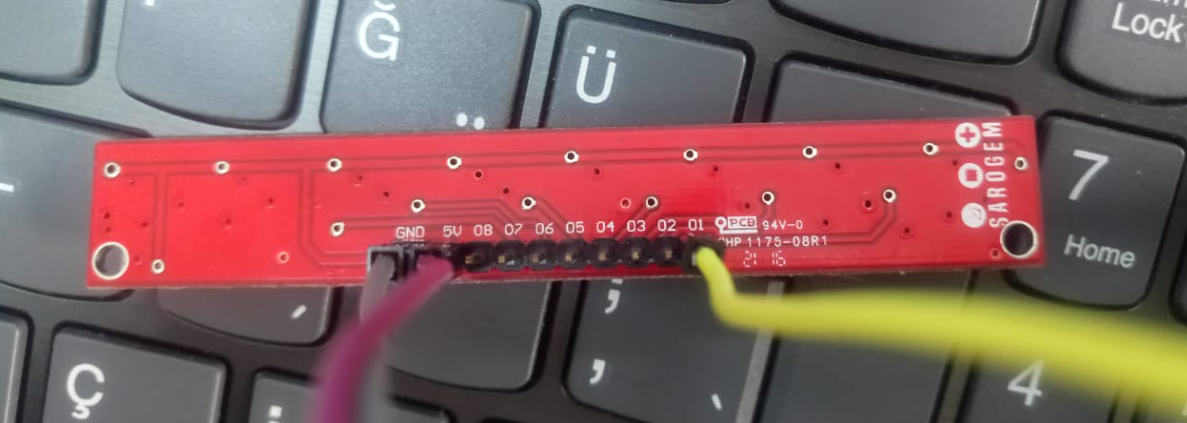
Elimizde bir tane qtr sensör vardı. Açıkcası ilk başta analog mu yani qtr8a mı yoksa digital qtr8rc mi anlayamadık. Sensörün daha sonra analog uçlarındaki değerleri okuyarak analog olduğunu anladık.
Ancak biz deki sensörde bir eksik pin var. Emiter pin ne yazık ki yok. Türkiye menşeeli bir firma üretimi diyor. Bana kalırsa çin üretimi bir qtr8a gibi duruyor. Bunu kullandık projede. Araba birşekilde gidiyor ancak araç sağa çekiyor...")
Kullandığımız motor sürücü tb6612 pololu. Tekerlekler elektron tekerlek... Arduino nano, bir de bu sensör.
Açıkcası bu iş biraz ticariye döküldüğü için çok fazla qtr8a ile paylaşılan kod bulamadım internette. Ancak bir ispanyol açıklama satırlı PID kontrollü güzel bir kodda dediğim gibi çizgiyi tam takip ettiremedim. Bir sorun var gibi.
Acaba sorun ne olabilir? Bahsettiğim kodu paylaşan kişi qtr8a kullanmış ancak dijital 9 pinini emiter pinine bağlamış. Böylece kalibrasyonu programın en başında yaptırıyor. Ben mecburen bu kısımları devre dışı bıraktım. Kalibrasyon bu kartta mümkün değil gibi görünüyor.
Acaba nasıl bir yol izlemem gerekiyor. Elinde tb6612 pololu ve arduino nanolu qtr8a ile hazırlanmış ve bu yazılımla yarışmaya katılmış arkadaşlar var mı? Varsa maille falan paylaşırsa çok sevinirim. Bir firmadan rica ettim ama adamlar söylediğim gibi dini imanı para olunca ücret talep ettiler.... Böyle bir durumumuz zaten yok tüm parçaları cepten aldık. Yardımcı olacak arkadaşlara şimdiden teşekkür ediyorum.
Elimizde bir tane qtr sensör vardı. Açıkcası ilk başta analog mu yani qtr8a mı yoksa digital qtr8rc mi anlayamadık. Sensörün daha sonra analog uçlarındaki değerleri okuyarak analog olduğunu anladık.
Ancak biz deki sensörde bir eksik pin var. Emiter pin ne yazık ki yok. Türkiye menşeeli bir firma üretimi diyor. Bana kalırsa çin üretimi bir qtr8a gibi duruyor. Bunu kullandık projede. Araba birşekilde gidiyor ancak araç sağa çekiyor...
Kullandığımız motor sürücü tb6612 pololu. Tekerlekler elektron tekerlek... Arduino nano, bir de bu sensör.
Açıkcası bu iş biraz ticariye döküldüğü için çok fazla qtr8a ile paylaşılan kod bulamadım internette. Ancak bir ispanyol açıklama satırlı PID kontrollü güzel bir kodda dediğim gibi çizgiyi tam takip ettiremedim. Bir sorun var gibi.
Acaba sorun ne olabilir? Bahsettiğim kodu paylaşan kişi qtr8a kullanmış ancak dijital 9 pinini emiter pinine bağlamış. Böylece kalibrasyonu programın en başında yaptırıyor. Ben mecburen bu kısımları devre dışı bıraktım. Kalibrasyon bu kartta mümkün değil gibi görünüyor.
Acaba nasıl bir yol izlemem gerekiyor. Elinde tb6612 pololu ve arduino nanolu qtr8a ile hazırlanmış ve bu yazılımla yarışmaya katılmış arkadaşlar var mı? Varsa maille falan paylaşırsa çok sevinirim. Bir firmadan rica ettim ama adamlar söylediğim gibi dini imanı para olunca ücret talep ettiler.... Böyle bir durumumuz zaten yok tüm parçaları cepten aldık. Yardımcı olacak arkadaşlara şimdiden teşekkür ediyorum.
