
Çok eski bir web tarayıcısı kullanıyorsunuz. Bu veya diğer siteleri görüntülemekte sorunlar yaşayabilirsiniz..
Tarayıcınızı güncellemeli veya alternatif bir tarayıcı kullanmalısınız.
Tarayıcınızı güncellemeli veya alternatif bir tarayıcı kullanmalısınız.

- Mesajlar
- 497
Sabit radar olarak böyle bir proje var ama sizin durumunuzda işe yarar mı bilemiyorum.
Araç yanınızdan geçerken hız ölçmek probleminizi çözseydi çok daha kolay olurdu.
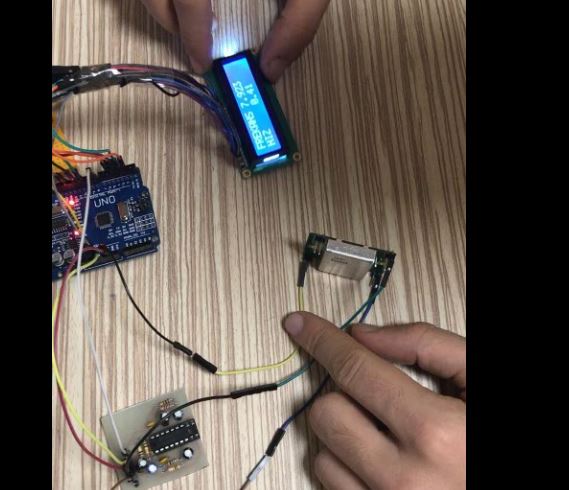
ARDUİNO+HB100 Hız ÖLÇÜMÜ - Proje Sayfam
4.9 (98.67%) 15 votes HB100 nedir? Hb100 doppler kayması mantığıyla çalışan bir çeşit radardır. Bu çip X bandında 10.525 GHz frekans kullanır. Düşük güç tüketimi ve maliyeti göz önüne alındığında kullanımı oldukça uygundur.Ölçüm mesafesi ise 20 metreye kadar çıkabilmektedir. Asıl kullanım amacı...
projesayfam.com
Araç yanınızdan geçerken hız ölçmek probleminizi çözseydi çok daha kolay olurdu.
- Mesajlar
- 849
Kendi hızınızı bildiğiniz sürece kolay bı matematik hesabı hocam
- Mesajlar
- 497
Tereddüt ettiğim nokta mikrodalga radar modülünün hareket halindeyken kullanımıyla ilgiliydi hocam.Kendi hızınızı bildiğiniz sürece kolay bı matematik hesabı hocam
bu biraz karmaşık geldi hocam. olabilir tabi ama daha basit bir yolu var mı merak ediyorum.Sabit radar olarak böyle bir proje var ama sizin durumunuzda işe yarar mı bilemiyorum.
ARDUİNO+HB100 Hız ÖLÇÜMÜ - Proje Sayfam
4.9 (98.67%) 15 votes HB100 nedir? Hb100 doppler kayması mantığıyla çalışan bir çeşit radardır. Bu çip X bandında 10.525 GHz frekans kullanır. Düşük güç tüketimi ve maliyeti göz önüne alındığında kullanımı oldukça uygundur.Ölçüm mesafesi ise 20 metreye kadar çıkabilmektedir. Asıl kullanım amacı...projesayfam.com
Araç yanınızdan geçerken hız ölçmek probleminizi çözseydi çok daha kolay olurdu.
nasıl yani hocam açar mısınızKendi hızınızı bildiğiniz sürece kolay bı matematik hesabı hocam
- Mesajlar
- 363
ultrasonik mesafe sensörü ile 1 saniyede aradaki mesafe farkını bulun mesela ilk etapta arada 100 metre var 1 saniye sonra aradaki fark 50 metreye düştü.
yol=hız *zaman formülünden
50 =hız*1 den hız=50 çıktı. sizin hızınız 100 m/sn şeklinde çıkarsa diğerinin hızı 150 dir.
yol=hız *zaman formülünden
50 =hız*1 den hız=50 çıktı. sizin hızınız 100 m/sn şeklinde çıkarsa diğerinin hızı 150 dir.
mantıklı güzel fikir.ultrasonik mesafe sensörü ile 1 saniyede aradaki mesafe farkını bulun mesela ilk etapta arada 100 metre var 1 saniye sonra aradaki fark 50 metreye düştü.
yol=hız *zaman formülünden
50 =hız*1 den hız=50 çıktı. sizin hızınız 100 m/sn şeklinde çıkarsa diğerinin hızı 150 dir.
- Mesajlar
- 3,308
tam bir proje için bu konuyu düşünürken iyi oldu.ultrasonik mesafe sensörü ile 1 saniyede aradaki mesafe farkını bulun mesela ilk etapta arada 100 metre var 1 saniye sonra aradaki fark 50 metreye düştü.
yol=hız *zaman formülünden
50 =hız*1 den hız=50 çıktı. sizin hızınız 100 m/sn şeklinde çıkarsa diğerinin hızı 150 dir.
- Mesajlar
- 2,358
kendi hızını nasıl ölçecekultrasonik mesafe sensörü ile 1 saniyede aradaki mesafe farkını bulun mesela ilk etapta arada 100 metre var 1 saniye sonra aradaki fark 50 metreye düştü.
yol=hız *zaman formülünden
50 =hız*1 den hız=50 çıktı. sizin hızınız 100 m/sn şeklinde çıkarsa diğerinin hızı 150 dir.
- Mesajlar
- 363
ilk soruya göre cevapladım ama kendi hızını ölçmesi içinde iki tane mz80 koyarsınız arası 50 metre olsun mesela ki mz80 arasındaki süreyi milis fonksiyonu ile ölçersiniz yani mesafe belli süre belli oradan hızı ölçebilirsiniz 50 mt=hız*1 saniye olsa hızı 50 olur. diğerini de yine yukarıdaki ultrasonik mesafe sensörü ile halledilir.kendi hızını nasıl ölçecek
- Mesajlar
- 315
kendi hızınızı enkoder'in saydığı değere ve tekerinizin çapına göre de bulabilirsiniz.
https://automaticaddison.com/how-to-calculate-the-velocity-of-a-dc-motor-with-encoder/
https://automaticaddison.com/how-to-calculate-the-velocity-of-a-dc-motor-with-encoder/
